让机器狗走进复杂现场:光明实验室成功研发具身智能巡检检测机器人开放平台
![]() 发布时间:2026-04-28
发布时间:2026-04-28![]() 作者:光明实验室
作者:光明实验室![]() 浏览:463次
浏览:463次
在工业巡检、地下空间测量、边坡工地安全监测等场景中,传统人工巡检往往面临环境复杂、通行受限、风险较高、数据记录不连续等问题。为提升复杂场景下的自主巡检与智能检测能力,在李清泉院士指导下,光明实验室空间智能中心陈首彬研究员带领小组成员,成功研发了一套具身智能巡检检测机器人开放平台,以四足机器狗为移动载体,集成感知、导航、决策、操作与扩展开发能力,面向科研验证与场景应用提供一体化解决方案。
灵活可靠的四足移动平台
该平台采用四足机器狗作为本体,具备良好的机动性和环境适应能力,可在室内、地下空间、工地边坡等多类场景中执行移动巡检任务。
机器人本体站立尺寸约为63×36×42cm,重量约15kg,行走速度最高可达5m/s,续航里程约6km,支持40°斜坡行走,最大攀爬落差高度约16cm。平台还支持持续行走负载,可根据任务需要搭载传感器、计算单元、机械臂及其他功能模块。
模块化扩展
适配不同任务需求
为了满足不同场景下的巡检、检测和科研开发需求,平台采用模块化扩展设计。
在计算单元方面,可根据任务复杂度选配 Jetson Thor、Orin AGX、Orin NX、Orin Nano 等不同算力平台;在操作单元方面,可选择不带机械臂、松灵6轴机械臂、松灵7轴机械臂或其他品牌机械臂;在任务载荷方面,支持扩展3D建图/测绘模块、双光谱超视觉巡检模块、RTK高精定位定向模块、声学成像安全检测模块等。
这意味着同一套机器狗平台,既可以作为轻量化自主移动平台,也可以升级为具备环境感知、目标检测、机械操作和空间测绘能力的复合型具身智能系统。
预集成算法能力
开源平台降低开发门槛
平台围绕“感知—导航—决策—操作”预集成典型具身智能算法能力,便于科研人员和开发者快速开展验证。
目前平台支持:
SLAM与自主导航
可用于室内环境建图、定位、路径规划、自主避障和定点巡检。
强化学习
支持运动控制、策略优化和任务级行为学习,便于开展仿真到实机迁移、策略泛化和奖励设计等研究。
VLN视觉语言导航
支持基于自然语言指令的目标理解与路径执行,例如“去某个位置”“找到某类目标”等任务。
VLA视觉语言动作
可结合机械臂完成抓取、交互、操作等任务,为具身大模型、多模态决策与任务泛化研究提供实验基础。
平台兼容 ROS 1 / ROS 2,便于接入不同算法框架和代码工具链;同时具备开放结构设计,方便模块扩展和二次改装,能够缩短从算法开发到实机验证的周期。
面向真实场景的巡检检测示范
室内具身巡检
在室内场景中,机器人可执行机房、实验室、楼宇空间等巡检任务,覆盖火焰、烟雾、温度、漏液、阀门状态、灭火器状态、仪表读数、指示灯状态、饮水机水量等目标检测。
结合机械臂和智能决策能力,平台还可进一步探索开关门、按电梯、跨楼层移动等更复杂的具身任务。
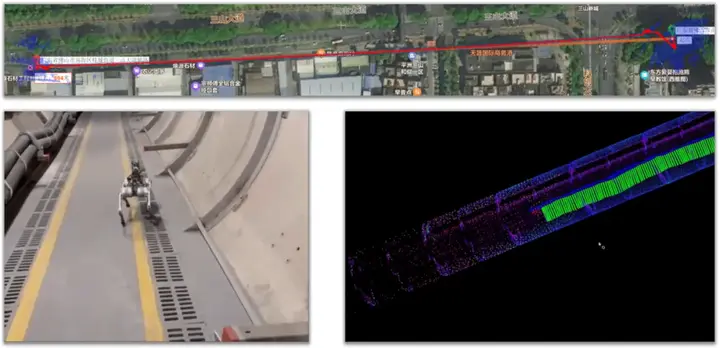
地下空间巡检测量
在地下隧道、管道和电力管廊等场景中,机器狗可搭载激光雷达、相机等传感器进行巡检与测量,对隧道壁渗水、衬砌裂缝、路面坑槽、疏散通道照明等问题进行识别。
相比人工巡检,四足平台更适合进入空间狭窄、光照复杂或存在一定风险的地下环境,并可同步完成空间数据采集与三维建图。
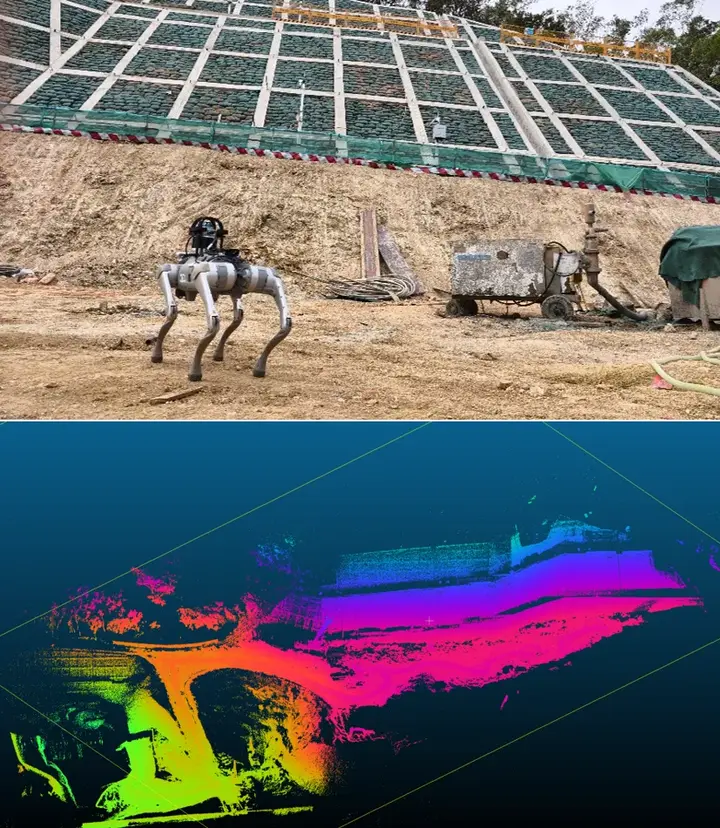
边坡工地巡检检测
在边坡工地场景中,平台可搭载激光雷达和相机进行边坡建图,同时监测现场施工规范,例如人员是否佩戴安全帽、安全服等,也可用于边坡位移变化测量、排水系统巡查和防护设施完整性检查。
该类应用有助于提升边坡施工现场的安全管理能力,辅助预防滑坡等自然灾害风险。
从科研平台到场景应用
具身智能的发展,正在推动机器人从“能移动”走向“能理解、能决策、能操作”。这套具身智能巡检检测机器人平台,不仅具备较强的硬件扩展能力,也为SLAM导航、视觉语言导航、视觉语言动作、强化学习、三维建图和多模态检测等方向提供了统一的实机验证载体。
未来,平台将持续面向工业巡检、地下空间、智慧园区、工地安全、应急检测等场景进行能力拓展,推动具身智能技术从实验室走向真实复杂现场。
END
素 材 丨泛在感知与空间智能团队
编 辑 丨 李沛昱 曾小告
责 编 丨 陈贞儒
欢迎投稿、建议:gmlab@gml.ac.cn



 发布时间:2026-04-28
发布时间:2026-04-28 作者:光明实验室
作者:光明实验室 浏览:463次
浏览:463次